Différences entre versions de « Hack-MotorSkin-Demo2 »
(→Tester) |
|||
| Ligne 125 : | Ligne 125 : | ||
= Corrigé la dérive = | = Corrigé la dérive = | ||
| − | Si vous avez parcouru le tutoriel, vous avez fort probablement croisé le point intitulé " | + | Si vous avez parcouru le tutoriel, vous avez fort probablement croisé le point intitulé "[[Hack-MotorSkin-Tester#Corriger_la_d.C3.A9rive|la dérive]]". |
Il est possible de démarrer la console en lui passant le paramètre de correction de la dérive. | Il est possible de démarrer la console en lui passant le paramètre de correction de la dérive. | ||
Version du 18 septembre 2016 à 22:09
Introduction
|
|
En cours de traduction/élaboration. |
StdinCtrl est un programme assez simple qui permet de contrôler votre PyBoard depuis un terminal via la console REPL. Une fois démarré, vous pourrez facilement contrôler la direction et la vitesse de votre bolide à partir des touches du pavé numérique.

| Ce programme nécessite un motor-skin + régulateur de tension. |
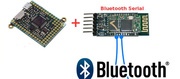
Extra: Module Bluetooth
Si vous prêtez attention a l'image, nous avons greffé un module complémentaire sur la PyBoard. Il s'agit d'un module Bluetooth Serial HC05 branché sur l'UART(1) de la PyBoard.
Grâce à ce module (et au tutoriel ci-dessous), nous pourrons obtenir une invite de commande REPL via Bluetooth... ce qui sera pratique pour contrôler la motor skin depuis un ordinateur (un terminal)
Utiliser un module Bluetooth série avec PyBoard. Dupliquer REPL sur Bluetooth.
Un petit films
MOVIE
Vous pouvez également accéder directement à la vidéo ici sur YouTube LIEN
Utilisation
- Le programme démarre lorsque vous appeler la fonction console() mais nous y reviendrons plus tard.
Une fois actif, le programme allume la LED utilisateur 4 (LED Bleue) de la carte PyBoard. - Vous pouvez utiliser la touche "q" (minuscule) Re-pressez ce même bouton pour arrêter ce programme.
La LED utilisateur de la carte PyBoard s'éteint.

Copier
Pour copier le script sur la carte, brancher votre pyboard et copier le fichier stdinctrl.py depuis les sources disponibles (ou l'archive) dans notre dépôt GitHub (voir notes d'installation).

N'oubliez pas d'éjecter le lecteur de la carte MicroPython si vous voulez redémarrer débrancher votre PyBoard de votre PC.
Tester
Vous pouvez tester très facilement le script à l'aide d'une connexion REPL.
Si vous avez répliqué la session REPL sur votre connexion Bluetooth alors vous pourrez piloter votre robot à roulette depuis une connexion sans fils.
Saisissez simplement le code suivant en ligne de commande pour charger et exécuter le code disponible dans stdinctrl.py
from stdinctrl import *
console()
Vous devriez alors voir le résultat apparaître le message suivant:
-------------------- MotorSkin Interactive Console q: quit to REPL - quitter vers REPL 8: increase speed - accelerer 2: decrease speed - ralentir 7: going left - aller a gauche 9: going right - aller a droite 4: turn left - tourner à gauche 6: turn right - tourner à droite 5: HALT - ARRET -------------------- INIT MOTORSKIN READY
| L'invite REPL n'est pas disponible pendant que le programme fonctionne, vous pouvez revenir à REPL en pressant la touche "q". |
Vous pouvez également interrompre l'exécution du programme en pressant CTRL+C plusieurs fois.
En pressant les différentes touches de commandes (cfr début de cette page), vous commencerez à contrôler votre petit bolide.
Le programme de contrôle renvoi également différents messages concernant l'exécution des différentes commandes.
Voici un exemple complet incluant les différents messages retournée par le script:
>>> from stdinctrl import * >>> console() -------------------- MotorSkin Interactive Console q: quit to REPL - quitter vers REPL 8: increase speed - accelerer 2: decrease speed - ralentir 7: going left - aller a gauche 9: going right - aller a droite 4: turn left - tourner à gauche 6: turn right - tourner à droite 5: HALT - ARRET -------------------- INIT MOTORSKIN READY speed:50 speed:60 speed:70 bending:70 @ 5 bending:70 @ 10 bending:70 @ 15 speed:80 speed:90 halted speed:-50 speed:-60 halted left:0 speed:0 speed:50 left:50 speed:50 right:50 speed:50 BYE >>>
Corrigé la dérive
Si vous avez parcouru le tutoriel, vous avez fort probablement croisé le point intitulé "la dérive".
Il est possible de démarrer la console en lui passant le paramètre de correction de la dérive.
from stdinctrl import *
console( derivative_fix=-10 )
Créé par Meurisse D. pour MCHobby.be - Created by Meurisse D. for MCHobby.be
Toute référence, mention ou extrait de cette traduction doit être explicitement accompagné du texte suivant : « Traduction par MCHobby (www.MCHobby.be) - Vente de kit et composants » avec un lien vers la source (donc cette page) et ce quelque soit le média utilisé.
L'utilisation commercial de la traduction (texte) et/ou réalisation, même partielle, pourrait être soumis à redevance. Dans tous les cas de figures, vous devez également obtenir l'accord du(des) détenteur initial des droits. Celui de MC Hobby s'arrêtant au travail de traduction proprement dit.