Hack-micropython-Robot2Wheel
Introduction
Simple et efficace, le Kit Robot 2 Roues permet de créer facilement, à coût raisonnable, une plateforme robotique aux dimensions intéressantes. Ces dimensions sont parfaites pour la plupart des projets éducatifs et d'apprentissage... pas trop petit... ni trop grand.

Grâce à ce kit, vous pourrez propulser facilement un robot à partir d'un Raspberry, Arduino, PyBoard, Olinuxino ou autre plateforme de prototypage.
La dérive (sacré jumeaux!)
Dans ce tutoriel, nous allons commander les moteurs en vitesse à l'aide d'un signal PWM. Cela permettra, en autre, de corriger la dérive de la plateforme.
Deux moteurs d'un même fabricant et d'un même modèle ne sont jamais totalement identiques. Comme des jumeaux, ils se ressemblent fort mais les parents arrivent toujours les distinguer. La raison? d'infimes différences, identiques mais pas tout à fait.
C'est pareil pour les moteurs... ils sont semblables mais pas parfaitement identiques. Ils tournent à la même vitesse mais pas parfaitement la même. Il y a donc toujours un moteur qui tourne un poil plus vite que l'autre.
Même si cette différence est réduite au minimum, une fois que vous ferrez parcourir une longue distance en ligne droite, vous constaterez alors que la plateforme tendra à se déporter légèrement sur la droite (ou la gauche).
La solution consiste à ralentir le moteur qui est trop rapide, c'est pour cela que nous avons besoin du contrôle PWM... pour aussi pouvoir contrôler la dérive.
Prérequis
Se familiariser avec PyBoard
Avant de vous lancer dans cette aventures, vous aurez besoin de savoir comment utiliser et communiquez avec votre carte PyBoard.
Nous avons déjà écrit de nombreux tutoriels d'introduction en Français que vous trouverez dans l'accueil MicroPython.
Nous feront inévitablement usage du mode REPL bien pratique et la prise en main des scripts PyBoard.py et PyTerm.py seront de précieux alliés
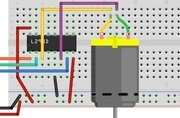
Commande Moteur
La commande moteur est basé sur l'utilisation d'un L293D (pont-H). Ainsi, nous pensons qu'il est préférable de jeter un petit coup d'oeil sur le tutoriel L293D ci dessous.
Matériel nécessaire
| Un kit est en cours de constitution... en attendant, vous pourrez vous procurer le matériel séparément en suivant les liens suivants |
- Kit Robot 2 roues (inclus également le bloc d'alimentation)
- Un MicroPython avec ses connecteurs sans oublier le câble microUSB pour le brancher sur votre ordinateur.
- Un pont-H L293D (inclus la capacité de découplage 0.47µF)
- Un assortiment de fil multi-fonctionnel.
- Un breadboard demi-taille
- Un switch pour Breadboard
- Des capacités de 200nF (optionnel)
Projet original réalisé par Meurisse D. pour MC Hobby SPRL
Toute référence, mention ou extrait de cette traduction doit être explicitement accompagné du texte suivant : « Traduction par MCHobby (www.MCHobby.be) - Vente de kit et composants » avec un lien vers la source (donc cette page) et ce quelque soit le média utilisé.
L'utilisation commercial de la traduction (texte) et/ou réalisation, même partielle, pourrait être soumis à redevance. Dans tous les cas de figures, vous devez également obtenir l'accord du(des) détenteur initial des droits. Celui de MC Hobby s'arrêtant au travail de traduction proprement dit.