Différences entre versions de « Spark-Core-Brochage »
| Ligne 2 : | Ligne 2 : | ||
== Introduction == | == Introduction == | ||
| − | {{bloc-etroit|text=Le | + | {{bloc-etroit|text=Le Particle Core offre un total de 18 I/O (entrées/sorties) à l'utilisateur: |
* D0 à D7: broches digitales | * D0 à D7: broches digitales | ||
* A0 à A7: broches analogies (aussi utilisable en mode digital) | * A0 à A7: broches analogies (aussi utilisable en mode digital) | ||
| Ligne 13 : | Ligne 13 : | ||
{{SPARKImage|Spark.IO-Brochage-GPIO.png|800px}} | {{SPARKImage|Spark.IO-Brochage-GPIO.png|800px}} | ||
| − | Vous pouvez également obtenir [http://docs.spark.io/assets/images/spark-pinout.png ce diagramme directement depuis le site de | + | Vous pouvez également obtenir [http://docs.spark.io/assets/images/spark-pinout.png ce diagramme directement depuis le site de Particle Core] (''png''). |
== Broches digitals == | == Broches digitals == | ||
| Ligne 38 : | Ligne 38 : | ||
Les broches sont configurées en sortie (''output'') mais la valeur en sortie n'est pas une tension analogique mais plutôt un signal PWM avec un cycle utile pouvant varier sur la totalité de la puissance du signal. Vous pouvez consulter [http://mchobby.be/wiki/index.php?title=Rasp-Hack-L293-PWM cette page pour en apprendre plus sur le signal PWM]. | Les broches sont configurées en sortie (''output'') mais la valeur en sortie n'est pas une tension analogique mais plutôt un signal PWM avec un cycle utile pouvant varier sur la totalité de la puissance du signal. Vous pouvez consulter [http://mchobby.be/wiki/index.php?title=Rasp-Hack-L293-PWM cette page pour en apprendre plus sur le signal PWM]. | ||
| − | Sur le | + | Sur le Particle Core, le signal PWM à une résolution de 8 bits et fonctionne à une fréquence de 500Hz. |
L'utilisateur peut envoyer une valeur de signal PWM à l'aide de la fonction <code>analogWrite()</code>. Comme pour un Arduino, la valeur doit être comprise entre 0 et 255. | L'utilisateur peut envoyer une valeur de signal PWM à l'aide de la fonction <code>analogWrite()</code>. Comme pour un Arduino, la valeur doit être comprise entre 0 et 255. | ||
| Ligne 51 : | Ligne 51 : | ||
Le premier port série est celui accessible sur le port USB en tant que périphérique CDC (Communications Device Class). Une fois configuré, il se présentera comme un port COM virtuel sur l'ordinateur. (usage: <code>Serial.begin(9600);</code>) | Le premier port série est celui accessible sur le port USB en tant que périphérique CDC (Communications Device Class). Une fois configuré, il se présentera comme un port COM virtuel sur l'ordinateur. (usage: <code>Serial.begin(9600);</code>) | ||
| − | Le second est un port série matériel (USART) disponible sur les broches RD et TX du | + | Le second est un port série matériel (USART) disponible sur les broches RD et TX du Particle Core. Il faut utiliser le code <code>Serial1.begin(9600);</code> pour l'utiliser. |
| − | Le troisième est également un port série matériel (USART) accessible via les broches D1(Tx) et D0(Rx) du | + | Le troisième est également un port série matériel (USART) accessible via les broches D1(Tx) et D0(Rx) du Particle Core. Pour pouvoir l'utiliser, il faut utiliser le code <code>Serial2.begin(9600);</code>. |
| − | La configuration et l'utilisation de ces ports séries est décrite dans le document [http://docs.spark.io/firmware/#communication-serial serial functions] ('' | + | La configuration et l'utilisation de ces ports séries est décrite dans le document [http://docs.spark.io/firmware/#communication-serial serial functions] (''Particle.io, anglais''). |
{{ambox-stop|text=Attention: la tension applicable sur ces broches est 0V à 3.3V et {{underline|ne doit pas être connecté directement}} sur le port série d'un ordinateur fonctionnant à +/- 12V car cela endommagera irrémédiablement votre Core.}} | {{ambox-stop|text=Attention: la tension applicable sur ces broches est 0V à 3.3V et {{underline|ne doit pas être connecté directement}} sur le port série d'un ordinateur fonctionnant à +/- 12V car cela endommagera irrémédiablement votre Core.}} | ||
| Ligne 95 : | Ligne 95 : | ||
En plus de pouvoir télécharger et mettre le FirmWare à jour via WiFi et USB, les utilisateurs peuvent également avoir un accès direct à la puce STM32 via le canal JTAG. | En plus de pouvoir télécharger et mettre le FirmWare à jour via WiFi et USB, les utilisateurs peuvent également avoir un accès direct à la puce STM32 via le canal JTAG. | ||
| − | Pour utiliser le canal JTAG, vous devez disposer d'un {{pl|522|shield JTAG pour | + | Pour utiliser le canal JTAG, vous devez disposer d'un {{pl|522|shield JTAG pour Particle Core}} et d'un programmateur JTAG. Spark à réaliser ses test de programmation à l'aide du [http://www.st.com/web/catalog/tools/FM146/CL1984/SC724/SS1677/PF251168 ST-LINK/V2] (''st.com, anglais''). |
{{SPARKImage|Spark.IO-Brochage-JTAG.jpg|480px}} | {{SPARKImage|Spark.IO-Brochage-JTAG.jpg|480px}} | ||
| − | Les specifications du {{pl|522|Shield JTAG}} sont disponibles [https://github.com/spark/shields/tree/master/Programmer%20Shield ici] ('' | + | Les specifications du {{pl|522|Shield JTAG}} sont disponibles [https://github.com/spark/shields/tree/master/Programmer%20Shield ici] (''Particle, GitHub, Anglais''). |
{{Spark-Core-Materiel-TRAILER}} | {{Spark-Core-Materiel-TRAILER}} | ||
Version actuelle datée du 24 octobre 2015 à 12:48
Introduction
Le Particle Core offre un total de 18 I/O (entrées/sorties) à l'utilisateur:
- D0 à D7: broches digitales
- A0 à A7: broches analogies (aussi utilisable en mode digital)
- 2 broches qui sont prédéfinies en Port Série - TX et RX.
| Toutes ces broches d'entrée/sortie fonctionne en 3.3V et il est important de garder cela en mémoire avant de brancher un périphérique externe sur le Core. La seule exception concerne les broches d'entrée tolérante à 5V: D0, D1, D3, D4, D5, D6 et D7 |
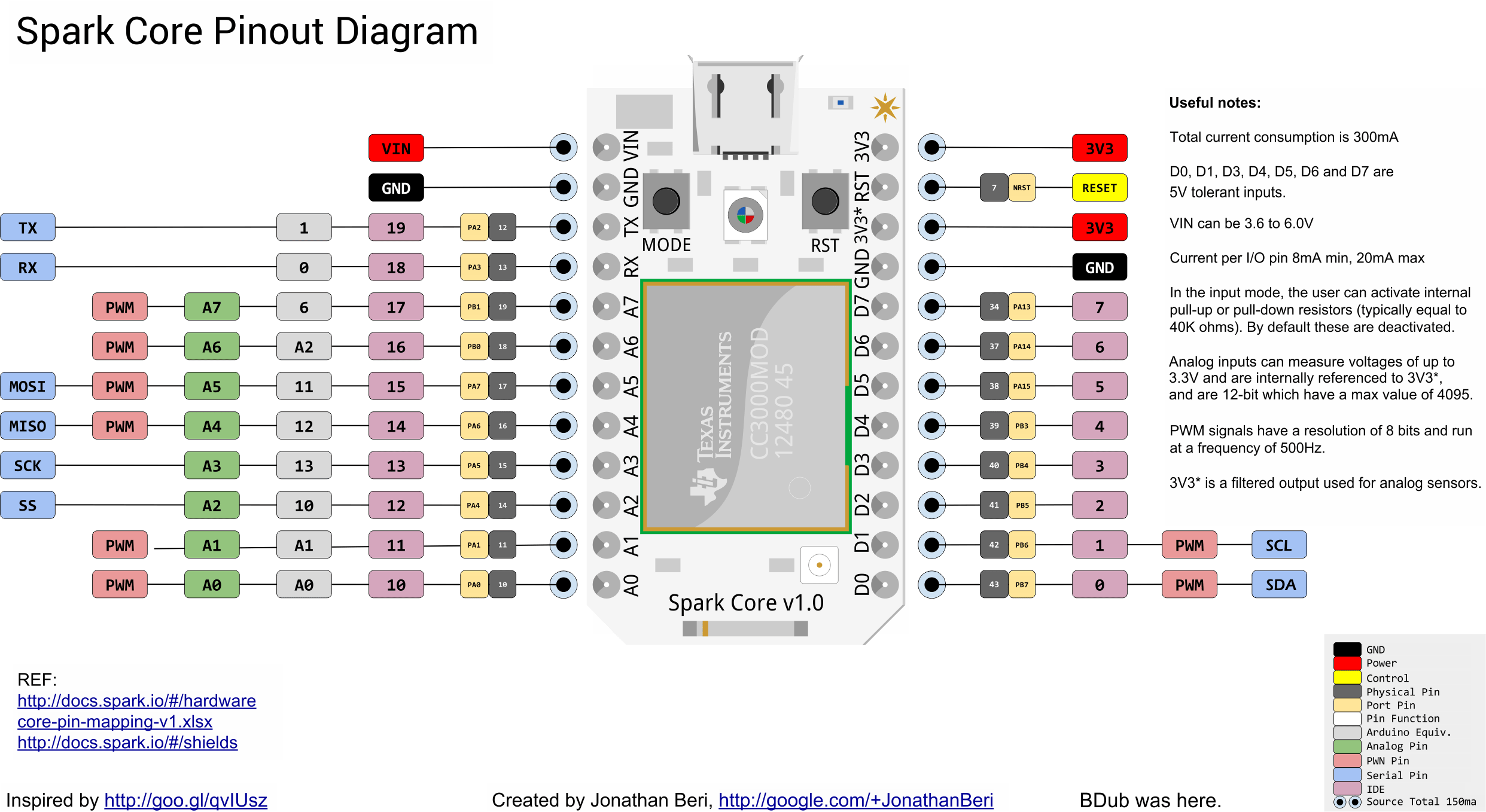
Diagramme

Crédit: Particle.IO www.particle.io
Vous pouvez également obtenir ce diagramme directement depuis le site de Particle Core (png).
{kind=link}
Broches digitals
Chaque broche du Core peut être configurée comme:
- Entrée input (avec ou sans activation de la résistance pull-up ou pull-down interne)
- Sortie output (avec un configuration push-pull comme arduino ou open-drain) en utilisant la fonction
pinMode().
Après l'initialisation du mode, l'utilisateur peut écrire ou lire les broches en utilisant les fonctions digitalWrite() (écriture digital) et digitalRead() (lecture digital).
Chacune de ces broches peut individuellement fournir ou absorber (source/sink) un maximum de 20mA.
En mode input (entrée), l'utilisateur peut activer des résistances pull-up ou pull-down interne (typiquement égal à 40K ohms). Sans action extérieure, une résistance Pull-Up (tirer vers le haut) ramène le potentiel de la broche à 3.3V tandis qu'une résistance pull-down (tirer vers le bas) ramènera le potentiel à 0 volts.
Les résistance pull-up/pull-down sont désactivées par défaut.
Entrées analogiques
Les broches de A0 à A7 peuvent être configurées comme entrée analogique pour mesurer des tension allant jusqu'à 3.3V (ces broches ont une référence de tension interne à VDD).
L'utilisateur peut lire les broches en utilisant la fonction analogRead() (lecture analogique) qui retourne une valeur sur 12 bits (correspondant à une valeur entière entre 0 et 4096).
Sorties PWM
Aussi appelées "sorties analogiques", ce terme pouvant conduire à des erreurs d'appréciation, comme il est largement utilisé par la communauté Arduino.
Les broches sont configurées en sortie (output) mais la valeur en sortie n'est pas une tension analogique mais plutôt un signal PWM avec un cycle utile pouvant varier sur la totalité de la puissance du signal. Vous pouvez consulter cette page pour en apprendre plus sur le signal PWM.
Sur le Particle Core, le signal PWM à une résolution de 8 bits et fonctionne à une fréquence de 500Hz.
L'utilisateur peut envoyer une valeur de signal PWM à l'aide de la fonction analogWrite(). Comme pour un Arduino, la valeur doit être comprise entre 0 et 255.
Cette fonctionnalité ne s'applique qu'aux broches: A0, A1, A4, A5, A6, A7, D0 et D1.
Ports séries (UART)
The Core features three serial ports.

Crédit: Particle.IO www.particle.io
Le premier port série est celui accessible sur le port USB en tant que périphérique CDC (Communications Device Class). Une fois configuré, il se présentera comme un port COM virtuel sur l'ordinateur. (usage: Serial.begin(9600);)
Le second est un port série matériel (USART) disponible sur les broches RD et TX du Particle Core. Il faut utiliser le code Serial1.begin(9600); pour l'utiliser.
Le troisième est également un port série matériel (USART) accessible via les broches D1(Tx) et D0(Rx) du Particle Core. Pour pouvoir l'utiliser, il faut utiliser le code Serial2.begin(9600);.
La configuration et l'utilisation de ces ports séries est décrite dans le document serial functions (Particle.io, anglais).
| Attention: la tension applicable sur ces broches est 0V à 3.3V et ne doit pas être connecté directement sur le port série d'un ordinateur fonctionnant à +/- 12V car cela endommagera irrémédiablement votre Core. |
Bus SPI
Le Bis SPI (Serial Peripheral Interface) est assez largement utilisé en électronique et disponible sur les broches:
- A2: SS (Slave Select)
- A3: SCK (Serial Clock)
- A4: MISO (Master In Slave Out)
- A5: MOSI (Master Out Slave In)

Crédit: Particle.IO www.particle.io
Note: Toutes ces broches fonctionnent en logique 3.3V.
Note de MCHobby:
Il existe de nombreux périphériques SPI dans l'écosystème Arduino... veuillez utilisez des périphériques SPI en 3.3V (ex: comme un MCP23017 pour étendre les GPIO sous 3.3v)
OU utiliser des convertisseurs de niveau logique 4 bit ou 8 bit pour échanger des informations entre systèmes 3.3v et 5v.
Bus I2C
La communication I2C s'effectue sur les broches GPIO D0 et D1. Le bus I2C est multiplexé avec les broches de Serial2 qui sera indisponible si vous voulez utiliser I2C.
- D0: SDA (Serial Data Line)
- D1: SCL (Serial Clock)

Crédit: Particle.IO www.particle.io
Ces deux broches fonctionne avec un niveau logique 3.3V mais sont tolérantes 5V en entrée.
Note de MCHobby:
En cas de besoin, vous pouvez également utiliser un convertisseur de niveau logique 4 bit compatible I2C pour échanger des informations entre systèmes 3.3v et 5v.
Nous avons eu l'occasion d'apprendre qu'il était préférable d'éviter la multiplication des périphériques I2C 5 Volts sur un BUS I2C 3.3v.
Connecteur JTAG
En plus de pouvoir télécharger et mettre le FirmWare à jour via WiFi et USB, les utilisateurs peuvent également avoir un accès direct à la puce STM32 via le canal JTAG.
Pour utiliser le canal JTAG, vous devez disposer d'un shield JTAG pour Particle Core et d'un programmateur JTAG. Spark à réaliser ses test de programmation à l'aide du ST-LINK/V2 (st.com, anglais).

Crédit: Particle.IO www.particle.io
Les specifications du Shield JTAG sont disponibles ici (Particle, GitHub, Anglais).
Source: Particle Core Hardware créé par Particle.IO.
Traduction réalisée par Meurisse D pour MCHobby.be - Translated by Meurisse D. for MCHobby.be
Traduit avec l'autorisation de Spark.IO - Translated with the permission from Particle.IO - Particle.IO
Toute référence, mention ou extrait de cette traduction doit être explicitement accompagné du texte suivant : « Traduction par MCHobby (www.MCHobby.be) - Vente de kit et composants » avec un lien vers la source (donc cette page) et ce quelque soit le média utilisé.
L'utilisation commercial de la traduction (texte) et/ou réalisation, même partielle, pourrait être soumis à redevance. Dans tous les cas de figures, vous devez également obtenir l'accord du(des) détenteur initial des droits. Celui de MC Hobby s'arrêtant au travail de traduction proprement dit.