Différences entre versions de « Pololu-Zumo-Shield-Arduino-fonctionnalites »
| (12 versions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Pololu-Zumo-Shield-Arduino-NAV}} | {{Pololu-Zumo-Shield-Arduino-NAV}} | ||
| − | |||
| − | |||
== Fonctionnalités principales == | == Fonctionnalités principales == | ||
| − | + | Les fonctionnalités de base du shield Zumo (v1.2) sont indiqués sur le diagramme suivant: | |
| − | {{POLImage|Pololu-Zumo-Shield-Arduino-fonctionnalites-00.jpg| | + | {{POLImage|Pololu-Zumo-Shield-Arduino-fonctionnalites-00.jpg|600px|Zumo Shield, v1.2, vue du dessus avec identification des composants}} |
| − | + | Pour le shield Zumo original, un [https://www.pololu.com/file/download/zumo-shield-v1.0-labeled-components.jpg?file_id=0J810 diagramme correspond est disponible ici] (206k, jpg) (la seule différence concerne le senseur intertiel placé sur la carte). | |
== Alimentation == | == Alimentation == | ||
| − | + | Le châssis Zumo dispose d'un comportement interne pour 4 piles AA. Pololu recommande l'utilisation de piles NiMH AA rechargeables, ce qui représente une tension nominale de 4.8 V (1.2 V par pile). Vous pouvez également utiliser des piles alcaline, ce qui produit une tension nominale de 6V. | |
| − | + | La bordure arrière du shield Zumo reprend un connecteur femelle deux pôles connecté directement sur les connecteurs des piles. Ce connecteur peut être utilisé pour recharger les piles du Zumo sans retirer les piles du châssis. La broche positive du connecteur de recharge est sur la gauche et identifié par un signe (+). Un chargeur tel que le iMAX-B6AC {{polpl|2588}}, connecté sur des fils de prototypage permet de recgarger directement le Zumo. | |
| − | + | Après la protection contre la polarisation inverse accidentelle, la tension des piles est connecté sur le reste du shield par l'intermédiaire de l'interrupteur d'alimentation. Cette tension d'alimentation (derrière l'interrupteur) est désigné comme VBAT et fournit la puissance aux moteurs par l'intermédiaire du DRV8835. Un régulateur boost est également alimenté par VBAT et produit une tension de 7.45 V permettant d'alimenter votre Arduino par l'intermédiaire de la broche Vin. Par la suite, les régulateurs 5V et 3.3V de votre Arduino fournira la tension d'alimentation au contrôleur moteur (étage logique), au buzzer et à la boussole du Zumo Shield. | |
| − | {{ambox-stop|text= | + | {{ambox-stop|text=Attention: lorsque vous alimentez votre Arduino depuis le shield Zumo, vous ne devez JAMAIS connecter une source d'alimentation différente sur la broche VIN -ou- connecteur d'alimentation de votre Arduino. Si vous le faites cela créera un court-circuit entre l'alimentation du shield et l'alimentation de l'Arduino, ce qui pourrait endommager votre Arduino et le shield Zumo de façon permanente.}} |
| − | {{ambox|text= | + | {{ambox|text=Lorsque votre Arduino est connecté sur votre ordinateur par l'intermédiaire du port USB, votre Arduino sera alimenté (et produira du 5V et 3.3V sur le shield) même si l'interrupteur du shield Zumo est coupé. Cette fonctionnalité est bien pratique si vous voulez tester votre programme Arduino sans permettre aux moteurs de fonctionner (puisque l'interrupteur ouvert déconnecte l'alimentation VBAT des moteurs.}} |
== LEDs == | == LEDs == | ||
| − | + | Il y a 5 LEDs sur le shield Zumo: | |
| − | * | + | * Un enseble de LEDs d'alimentation (dite "''Power''" en anglais), l'une <font color="blue">'''bleue'''</font> et l'autre <font color="red">'''rouge'''</font>, sont localisées sur chaque coin arrière du shield. |
| − | * | + | * Une LED utilisateur <font color="orange">'''jaune'''</font> est localisée sur le bord droit du shield. La LED est connectée sur la '''broche digitale 13''' d'Arduino (en parallèle de celle présente sur la carte Arduino). |
== Boutons poussoirs == | == Boutons poussoirs == | ||
| − | + | Deux boutons poussoirs peuvent être soudés sur le shield Zumo: | |
| − | * | + | * Le '''bouton Reset''' est localisé sur le bord gauche du shield. Il est connecté sur la broche RESET d'Arduino et peut être pressé pour réinitialiser votre Arduino. |
| − | * | + | * Le '''bouton Utilisateur''' (dit "''user''" en anglasi) est localisé sur la bordure arrière du shield. Le bouton est connecté sur la '''broche digitale 12''' de votre Arduino; Presser le bouton ramène le potentiel. Nous recommandons donc d'activer la résistance pull-up de la broche (pour maintenir la broche au niveau haut par défaut). La bibliothèque Pushbutton, inclus dans la [[Pololu-Zumo-Shield-Arduino-bibliotheque-Zumo|bibliothèque du shield Zumo]], permet de détecter plus facilement la pression du bouton (et applique un déparasitage logiciel). |
| + | |||
| + | == Pilote moteur == | ||
| + | Le Zumo shield intègre un contrôleur de moteur DRV8835 capable de piloter les deux micro-moteurs du shield Zumo. Quatres broches Arduino sont utilisé pour piloter le contrôleur DRV8835: | ||
| + | * '''Broche digitale 7''' contrôle le '''sens de rotation du moteur droit''' (LOW pour faire avancer le Zumo et HIGH pour le sens inverse). | ||
| + | * '''Broche digitale 8''' contrôle le '''sens de rotation du moteur gauche'''. | ||
| + | * '''Broche digitale 9''' contrôle la '''vitesse du moteur droit''' avec un signal PWM (pulse width modulation). | ||
| + | * '''Broche digitale 10''' contrôle la '''vitesse du moteur gauche''' avec un signal PWM. | ||
| + | |||
| + | La [[Pololu-Zumo-Shield-Arduino-bibliotheque-Zumo|bibliothèque ZumoMotors]] offre des fonctions qui permet de contrôler facilement les moteurs (et peut également prendre en charge l'inversion du sens de rotation au cas où vous auriez accidentellement inversé les soudures du moteurs). | ||
| + | |||
| + | == Buzzer == | ||
| + | Le shield Zumo inclus un buzzer qui peut être utilisé pour générer de simples sons et de la musique (par exemple, vous pourriez l'utiliser pour produire un décompte audible avant le début d'un match sumo). La ligne contrôlant le buzzer est identifiée par le libellé BZ; Si vous pilotez cette broche avec un signal haut/bas pulsé à une fréquence donnée, le buzzer produira un son de cette même fréquence. | ||
| + | |||
| + | La [[Pololu-Zumo-Shield-Arduino-bibliotheque-Zumo|bibliothèque ZumoBuzzer]] utilise le générateur PWM matériel pour jouer des notes sur le buzzer avec la '''broche digitale 3''' (OC2B) de votre Arduino '''Uno''' (ou ancien Arduino), ou avec la '''broche digitale 6''' (OC4D) d'un Arduino '''Leonardo''' ou '''A-Star 32U4 Prime'''. Un cavalier permet de connecter l'entrée BZ sur la broche Arduino appropriée comme cela est détaillé dans la [[Pololu-Zumo-Shield-Arduino-seneur-inertiel|Section 3.c]]. | ||
| + | |||
| + | == Zone d'extension Frontale/Avant == | ||
| + | Plusieurs connexions d'entrée/sortie, d'alimentation et masse sont placés dans la zone d'extension frontale du shield Zumo. Ces connexions permettent de monter des senseurs complémentaires ou autres composants. Le brochage de cette zone d'extension est détaillé dans la [[Pololu-Zumo-Shield-Arduino-extension-avant|Section 3.b]]. | ||
| + | == Senseurs Inertiels == | ||
| + | Le shield Zumo inclus des senseurs inertiels sur la carte. Ces senseurs peuvent être utilisés par des applications avancées pour détecter l'accélération et l'orientation: | ||
| + | * Le Shield Zumo '''v1.2''' embarque un accéléromètre et magnétomètre 3 axes '''LSM303D''' ainsi qu'un gyroscope 3-axes '''L3GD20H'''. | ||
| + | * Le Shield Zumo '''original''' embarque un accéléromètre et magnétomètre 3 axes '''LSM303DLHC'''. | ||
| + | Les senseurs inertiels sont détaillés dans la [[Pololu-Zumo-Shield-Arduino-extension-avant|Section 3.d]]. | ||
{{Pololu-Zumo-Shield-Arduino-TRAILER}} | {{Pololu-Zumo-Shield-Arduino-TRAILER}} | ||
Version actuelle datée du 9 avril 2017 à 20:51
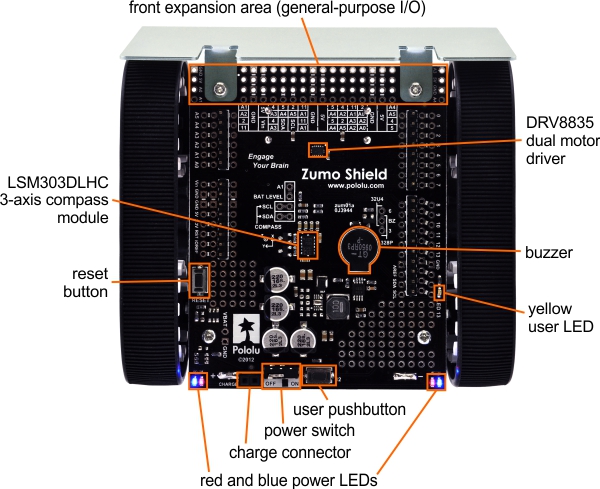
Fonctionnalités principales
Les fonctionnalités de base du shield Zumo (v1.2) sont indiqués sur le diagramme suivant:

Pour le shield Zumo original, un diagramme correspond est disponible ici (206k, jpg) (la seule différence concerne le senseur intertiel placé sur la carte).
{kind=link}
Alimentation
Le châssis Zumo dispose d'un comportement interne pour 4 piles AA. Pololu recommande l'utilisation de piles NiMH AA rechargeables, ce qui représente une tension nominale de 4.8 V (1.2 V par pile). Vous pouvez également utiliser des piles alcaline, ce qui produit une tension nominale de 6V.
La bordure arrière du shield Zumo reprend un connecteur femelle deux pôles connecté directement sur les connecteurs des piles. Ce connecteur peut être utilisé pour recharger les piles du Zumo sans retirer les piles du châssis. La broche positive du connecteur de recharge est sur la gauche et identifié par un signe (+). Un chargeur tel que le iMAX-B6AC lien pololu, connecté sur des fils de prototypage permet de recgarger directement le Zumo.
Après la protection contre la polarisation inverse accidentelle, la tension des piles est connecté sur le reste du shield par l'intermédiaire de l'interrupteur d'alimentation. Cette tension d'alimentation (derrière l'interrupteur) est désigné comme VBAT et fournit la puissance aux moteurs par l'intermédiaire du DRV8835. Un régulateur boost est également alimenté par VBAT et produit une tension de 7.45 V permettant d'alimenter votre Arduino par l'intermédiaire de la broche Vin. Par la suite, les régulateurs 5V et 3.3V de votre Arduino fournira la tension d'alimentation au contrôleur moteur (étage logique), au buzzer et à la boussole du Zumo Shield.
| Attention: lorsque vous alimentez votre Arduino depuis le shield Zumo, vous ne devez JAMAIS connecter une source d'alimentation différente sur la broche VIN -ou- connecteur d'alimentation de votre Arduino. Si vous le faites cela créera un court-circuit entre l'alimentation du shield et l'alimentation de l'Arduino, ce qui pourrait endommager votre Arduino et le shield Zumo de façon permanente. |
| Lorsque votre Arduino est connecté sur votre ordinateur par l'intermédiaire du port USB, votre Arduino sera alimenté (et produira du 5V et 3.3V sur le shield) même si l'interrupteur du shield Zumo est coupé. Cette fonctionnalité est bien pratique si vous voulez tester votre programme Arduino sans permettre aux moteurs de fonctionner (puisque l'interrupteur ouvert déconnecte l'alimentation VBAT des moteurs. |
LEDs
Il y a 5 LEDs sur le shield Zumo:
- Un enseble de LEDs d'alimentation (dite "Power" en anglais), l'une bleue et l'autre rouge, sont localisées sur chaque coin arrière du shield.
- Une LED utilisateur jaune est localisée sur le bord droit du shield. La LED est connectée sur la broche digitale 13 d'Arduino (en parallèle de celle présente sur la carte Arduino).
Boutons poussoirs
Deux boutons poussoirs peuvent être soudés sur le shield Zumo:
- Le bouton Reset est localisé sur le bord gauche du shield. Il est connecté sur la broche RESET d'Arduino et peut être pressé pour réinitialiser votre Arduino.
- Le bouton Utilisateur (dit "user" en anglasi) est localisé sur la bordure arrière du shield. Le bouton est connecté sur la broche digitale 12 de votre Arduino; Presser le bouton ramène le potentiel. Nous recommandons donc d'activer la résistance pull-up de la broche (pour maintenir la broche au niveau haut par défaut). La bibliothèque Pushbutton, inclus dans la bibliothèque du shield Zumo, permet de détecter plus facilement la pression du bouton (et applique un déparasitage logiciel).
Pilote moteur
Le Zumo shield intègre un contrôleur de moteur DRV8835 capable de piloter les deux micro-moteurs du shield Zumo. Quatres broches Arduino sont utilisé pour piloter le contrôleur DRV8835:
- Broche digitale 7 contrôle le sens de rotation du moteur droit (LOW pour faire avancer le Zumo et HIGH pour le sens inverse).
- Broche digitale 8 contrôle le sens de rotation du moteur gauche.
- Broche digitale 9 contrôle la vitesse du moteur droit avec un signal PWM (pulse width modulation).
- Broche digitale 10 contrôle la vitesse du moteur gauche avec un signal PWM.
La bibliothèque ZumoMotors offre des fonctions qui permet de contrôler facilement les moteurs (et peut également prendre en charge l'inversion du sens de rotation au cas où vous auriez accidentellement inversé les soudures du moteurs).
Buzzer
Le shield Zumo inclus un buzzer qui peut être utilisé pour générer de simples sons et de la musique (par exemple, vous pourriez l'utiliser pour produire un décompte audible avant le début d'un match sumo). La ligne contrôlant le buzzer est identifiée par le libellé BZ; Si vous pilotez cette broche avec un signal haut/bas pulsé à une fréquence donnée, le buzzer produira un son de cette même fréquence.
La bibliothèque ZumoBuzzer utilise le générateur PWM matériel pour jouer des notes sur le buzzer avec la broche digitale 3 (OC2B) de votre Arduino Uno (ou ancien Arduino), ou avec la broche digitale 6 (OC4D) d'un Arduino Leonardo ou A-Star 32U4 Prime. Un cavalier permet de connecter l'entrée BZ sur la broche Arduino appropriée comme cela est détaillé dans la Section 3.c.
Zone d'extension Frontale/Avant
Plusieurs connexions d'entrée/sortie, d'alimentation et masse sont placés dans la zone d'extension frontale du shield Zumo. Ces connexions permettent de monter des senseurs complémentaires ou autres composants. Le brochage de cette zone d'extension est détaillé dans la Section 3.b.
Senseurs Inertiels
Le shield Zumo inclus des senseurs inertiels sur la carte. Ces senseurs peuvent être utilisés par des applications avancées pour détecter l'accélération et l'orientation:
- Le Shield Zumo v1.2 embarque un accéléromètre et magnétomètre 3 axes LSM303D ainsi qu'un gyroscope 3-axes L3GD20H.
- Le Shield Zumo original embarque un accéléromètre et magnétomètre 3 axes LSM303DLHC.
Les senseurs inertiels sont détaillés dans la Section 3.d.
Basé sur "Zumo Shield for Arduino" de Pololu (www.pololu.com/docs/0J57) - Traduit en Français par shop.mchobby.be CC-BY-SA pour la traduction
Toute copie doit contenir ce crédit, lien vers cette page et la section "crédit de traduction". Traduit avec l'autorisation expresse de Pololu (www.pololu.com)
Based on "Zumo Shield for Arduino" from Pololu (www.pololu.com/docs/0J57) - Translated to French by shop.mchobby.be CC-BY-SA for the translation
Copies must includes this credit, link to this page and the section "crédit de traduction" (translation credit). Translated with the Pololu's authorization (www.pololu.com)